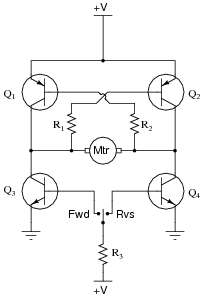
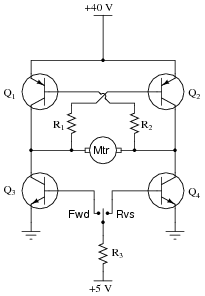
这个“h桥”电机控制电路的操作说明:
|
|
在任何给定的时刻,有多少晶体管被打开,又有多少晶体管被关闭?同时,解释如果电阻R1不能打开,电路的功能会发生什么。
预测以下故障将如何影响电路中的电机功能。独立考虑每一个故障(即一次一个,不能有多个故障):
|
|
对于每一种情况,请解释为什么由此产生的影响将会发生。
这个问题的目的是要从知道故障是什么的角度来处理电路故障排除,而不仅仅是知道症状是什么。虽然这不一定是一个现实的观点,它帮助学生建立必要的基础知识,从经验数据诊断故障的电路。诸如此类的问题之后(最终)应该有其他问题,要求学生根据测量结果来识别可能的错误。
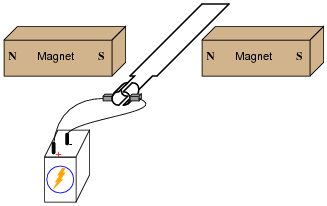
如果一个线圈的两端连接到两个半圆形的金属条上,使这两个金属条几乎形成一个完整的圆圈,而这些金属条与连接到电池相反两极的两个“刷子”接触,那么线圈会朝哪个方向旋转?
|
|
顺时针,不断。
用这个问题来挑战你的学生:有没有什么方法可以让线圈连续旋转,而不用那些半圆形的金属条与电池接触和断开接触?问你的学生在电机/发电机的术语中,这两个半圆金属条叫什么。
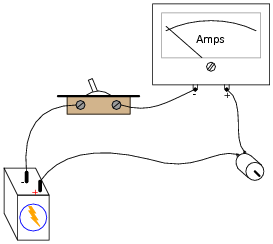
当开关关闭时,电流表最初会记录大量的电流,然后随着时间的推移,电流会衰减到一个更小的值,因为电机的速度:
|
|
针对欧姆定律,其中电流被认为是电压和电阻的直接函数(I =E/R),解释为什么会发生这种情况。毕竟,电机的绕组电阻不会随着它的旋转而改变,而且电池电压是相当恒定的。那么,为什么在初始启动速度和全速运行速度之间存在如此大的差异呢?
如果在电机轴上放置一个机械负载,迫使电机减速,您认为电机达到满载(空载)速度后,电流表将记录多少?
由于电枢在旋转时产生反电动势,电机电流与速度成反比。
后续问题:用另一个电池符号表示电机的反电动势,画出电池、开关、电流表和电机的等效电路示意图。反电动势电压的方向,反对到电池电压,或协助电池电压?
在启动过程中,电动机的所谓“涌入”电流是相当大的,高达正常满载电流的十倍!
每分钟转速4500转的直流电机产生3安培的电流,在其端子处测量到110伏特。电枢绕组的电阻,用欧姆计测量时,电机在静止,无动力,是2.45欧姆。电机每分钟4500转产生多少反电动势?
当电机最初通电(电枢转速= 0 RPM)时,有多少“涌入”电流,再次假设在端子处110伏特?
E计数器= 102.65 v @ 4500 RPM
我侵入= 44.9
这种计算方法帮助学生认识到电动机的“涌流”是多么重要。
解释什么是伺服运动系统,用你自己的话来说。
伺服电机的位置是由负反馈系统控制的。我知道,这个定义很简单,但是我想让你们表达答案用你自己的话!
Servos有许多不同的类型和大小,但它们都有相似的特点。你的学生应该完全可以在上面找到信息。
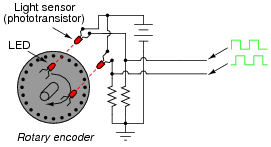
一种常见的旋转编码器是用来制造交输出:
|
|
这两个LED/光电晶体管对的排列方式使它们的脉冲输出始终为90o彼此不协调的正交输出编码器是有用的,因为它们允许我们确定运动方向和增量位置。
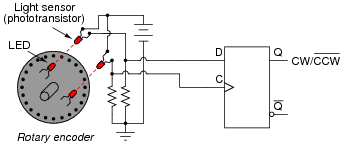
如果你使用d型触发器,构建一个正交方向检测器电路是很容易的:
|
|
分析这个电路,解释它是如何工作的。
如果你画出它的脉冲图并对其进行分析,这个电路的运行就很容易理解了触发器随着时间的推移。当编码器盘顺时针旋转时,Q输出变高;当逆时针时,Q变小。
后续问题:对电路输出所用的符号进行注释。不需要分析电路,“\(CW/\overline{CCW}\)”标签告诉你什么?
当编码器连接到数字计数器电路时,像这样的正交方向检测电路变得很重要。互补符号在反电路中也很常见。
当学生们处理这个问题时,他们可能不愿意画一个时间图,即使他们意识到这样一个图的效用。相反,许多人会试图仅仅通过观察来了解电路。注意单词“try”的重音。如果没有时序图,这个电路就更难理解了!在每个学生给你看一个计时图之前,不要解释这个电路。强调这个步骤虽然会消耗一些时间,但最终会节省时间。
无线电控制的玩具汽车、飞机和船只使用小型伺服电机来定位转向机构、发动机油门位置等。这些伺服有电机,位置传感器和控制电子封装在同一个塑料包装,使他们非常紧凑。雷竞技最新app
研究用于指挥这些伺服单元的控制信号的类型。换句话说,找出它们需要什么样的电子信号来“命令”它们去特定的位置。然后,提出一个可以产生这些信号的电路。
我不会在这里给出答案,不仅因为我想让你自己做所有的研究和思考,而且因为RC伺服技术可能已经改变了,因为我写了这个问题!
廉价的RC伺服的可用性使他们在实验室实验和学生项目中使用的理想。这是非常值得您的学生(和您的!)的时间来了解这些惊人的小设备是如何控制的!
当电机反向运行时,确定电路中所有元件的电压降。一定要解释你是如何执行所有分析的!假设0.7伏特作为正偏PN结的标准正向电压降,0.3伏特作为饱和BJT的标准集电极到发射极的电压降。
|
|
出版的条款和条件知识共享归因执照






